
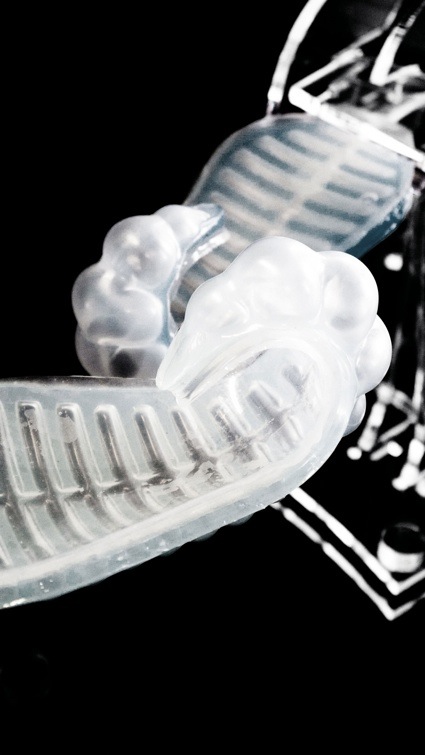
 Bijing Zhang & Francois Mangion, Furl: Soft Pneumatic Pavilion. Close up of furling air muscles
Bijing Zhang & Francois Mangion, Furl: Soft Pneumatic Pavilion. Close up of furling air muscles
Furl: Soft Pneumatic Pavilion is another* project i discovered at the graduation show of The interactive Architecture Lab, a Bartlett School of Architecture research group and Masters Programme headed by Ruairi Glynn, Christopher Leung and William Bondin.
Bijing Zhang and Francois Mangion explored the field of soft robotics and its future applications to create an adaptive architecture that responds to the human body:
“Furl” combines Electroencephalography (EEG) with advances in soft silicone casting of “air muscles”. The introduction of soft robotics replaces the mechanical principles in interactive architecture through a biological paradigm. EEG allows sensing of human brain functioning so that our environments begin moving and responding to our very thoughts. The designed components have a wide palette of deformation patterns of inflation. Through combination of soft and hard architectural elements, “Furl” creates a new platform for a kinetic responsive architecture which can let space interact with users needs and adapt itself to environmental conditions.
Furl: Soft Pneumatic Pavilion
Quick conversation with one of the creators of Furl:
Hi François! I hope I’m not going to shock you but I find that Furl is very fascinating but also a bit repulsive. It’s a bit of an upsetting creature. It’s mechanical but it also looks like it has some flesh that moves and ‘lives’ and that makes me uncomfortable. So why didn’t you decide to make a cute little soft robot?
It is not a shock at all, in the Interactive Architecture Lab, people often attach some kind of a distinct behavioural character to their work and Furl is no exception. We always thought about Furl as a curious ‘creature’ of polarities, soft responsive moving components in contrast with the stiff sharp structure.
 CNC Aluminium milled casting mould
CNC Aluminium milled casting mould
The description text in the catalogue mentions applications of soft robotics in architecture. Where do you see these applications happening? What would a ‘soft responsive architecture’ be able to do for us?
There’s a lot of interest in robotics in Architecture right now. Mostly in fabrication but increasingly thinking about how buildings and space as whole can be kinetic in their response to inhabitation. The problem is that robotics and mechanisms are typically rigid, sometimes dangerous, and generally incompatible with close proximate behavior to people. Soft robotics creates a new platform for architecture, to interact much more sensitively and directly to the human body. These physical properties of soft materials offer a potential to create ‘soft’ architectural structures or components which can shift shape, rotate, bend unlike anything we’ve seen in architecture to date. It might be sometime before such techniques are commonplace but we think it opens up new horizons in biologically inspired architecture, an interdisciplinary approach that could potentially lead to a revolution towards a ‘soft responsive architecture’.
Could you briefly tell us how the soft part works? In particular, what makes it inflate?
The soft responsive components forming Furl are “air muscles”. Made of two layers of silicone with different degrees of elasticity and with air channels cast within them. This difference in mechanical properties and the arrangement of the air channels makes the muscle transform in different ways. You can essentially programme the behaviour of the air muscles by varying moulds for casting the soft material so that it can produce different ‘gestures’ based on geometries (such as thickness, ratio, depiction) of the solid part the air muscles and air channels. A lot of material experimentation was lead by Bijing Zhang based on work by previous members of IAL including Ben Haworth and Rom Khampanya.
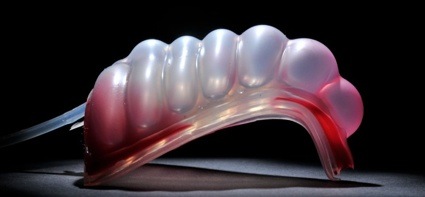 Bijing Zhang & Francois Mangion, Furl: Soft Pneumatic Pavilion
Bijing Zhang & Francois Mangion, Furl: Soft Pneumatic Pavilion
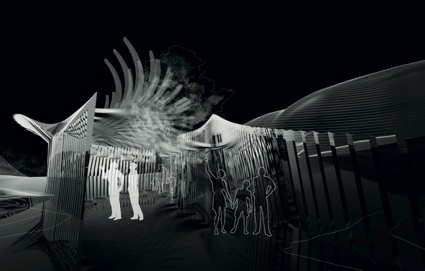 Proposal for ‘Furl’: encourage interaction through brain controlled dynamic behaviour of air muscles.
Proposal for ‘Furl’: encourage interaction through brain controlled dynamic behaviour of air muscles.
Can you explain me the part about Electroencephalography: “EEG allows sensing of human brain functioning so that our environments begin moving and responding to our very thoughts.” How does it work? What can EEG sense exactly? And how does Furl respond?
Our approach to brain sensing was developed in collaboration with DSI (Data Science Institute) at the Imperial College. Using their brain sensors we were able to get raw data about levels of alpha (α), beta (β), delta (δ), and theta (Θ) brain waves. The EEG signal is closely related to the level of concentration of the person. As the activity increases, the EEG shifts to higher dominating type of brain wave frequency and lower amplitude. If people concentrated it alters the theta brain waves frequency and this would active the muscles to inflate. This was actually quite a simple response to what is actually much more powerful data that harnessed with pattern recognition and learning algorithms could spell the end of needing to touch or speak to devices or environments to control them.
Since we’re exploring the softness of material, we felt that brain sensing in some way, was the equivalent in soft control. Even more powerful to simple control would be buildings able to take the data and predict and anticipate our needs even before we do. Its an exciting and equally terrifying area of research we’re starting to explore and this was just a prototype of that idea.
What was the biggest challenge(s) you encountered while developing the work?
The biggest challenge we had to deal with was to acquire the knowledge of the material’s physical properties and develop full understanding of the change in the dynamic behaviour of the air muscles with respect to the specific internal air channels. Through a series of design and fabricated tests we were continuously exploring the capability of mimicking a more natural behaviour and interaction.
The Making of Furl: Soft Pneumatic Pavilion
Are you planning to push this research into soft robotics any further?
Yes, definitely there are still a lot of challenges we have to deal with and the scaling up to architectural scale at this stage is something that we have to explore. On the other hand we also want to investigate the possibility of prototyping a one functional component with embedded hard materials for structural, interactive and dynamic capabilities. We also look forward in developing further the brain sensor control aiming towards full-scale soft responsive architecture.
Thanks François!
* see also The Eye Catcher.
Previous works referenced in this project: Slow Furl and HygroSkin-Meteorosensitive Pavilion.