
Another project developed last month during Vision Play, one of the Interactivos? workshops organized by Medialab Prado in Madrid. This time i asked Horacio González and Paola Guimerans to tell us something about biophionitos, a project they developed together with Igor González and other collaborators.
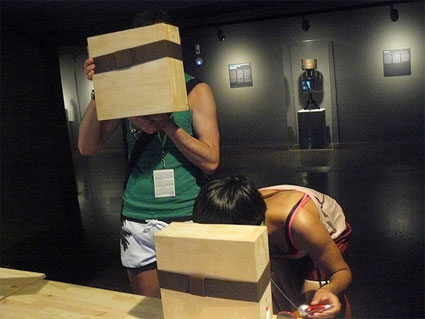 Biophionitos generates artificial life using a system similar to the zoetrope, an early animation device that produces an illusion of action from a rapid succession of static pictures. Horacio González, Paola Guimerans and Igor González added to the concept a touch of Processing and a whiff of Arduino to develop an interface able to create a physical animation which runs in an old-style but interactive phenakistoscope (one of them reacts to your caresses, another one wakes up when you talk to it, etc).
Biophionitos generates artificial life using a system similar to the zoetrope, an early animation device that produces an illusion of action from a rapid succession of static pictures. Horacio González, Paola Guimerans and Igor González added to the concept a touch of Processing and a whiff of Arduino to develop an interface able to create a physical animation which runs in an old-style but interactive phenakistoscope (one of them reacts to your caresses, another one wakes up when you talk to it, etc).
This virtual pet created with the system is made of a limited series of simple polygons which the program has modified in order to give the drawing what looks like a biological life.
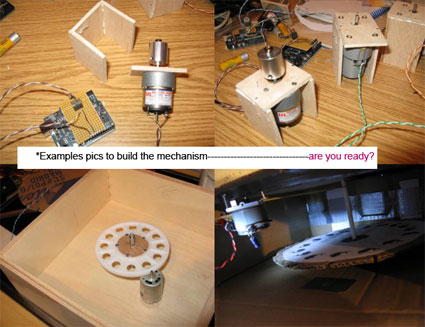
The artists also uploaded online a tutorial to do your own Biophionitos.
Note to spanish-speaking readers and in particular to the lovely people at TECAT (a great blog about media art i just discovered courtesy of Marcos, os lo recomiendo) who have kindly translated some of the Interactivos? posts in spanish: i pasted at the bottom of this post the original answers of Horacio and Paola. They wrote me in spanish and i translated their text in english.
 Can you tell us what lies behind the name Biophionitos? What did you decide to call the project this way?
Can you tell us what lies behind the name Biophionitos? What did you decide to call the project this way?
Paola
Well, this is a strange story. Horacio and i have been working together as a team for a few years under the name VHPlab. A few months ago, he came to spend some time in New York and we had the opportunity to travel together to San Francisco.
One our way back, in the plane, we started developing the project and thinking about the physical visualization of an auto-generative image. After much discussion, we managed to shape the idea and for various reasons, we agreed on the fact that the image should allude to a living being. We therefore decided that it would be an animal as it appears on our logotype.
The project matured conceptually and the time came to give it a name. At that moment, we knew that the prefix ‘bio’ had to be part of the name and we decided to use a game to complete the name.
Our objective was to invent a name that doesn’t exist, just like when you are a kid and call something you don’t know with a word you’ve invented. During the process we were reminded of Fiona, a very special child, the daughter of friends whom we had just met over that trip to San Francisco. Although it might sound surprising we also started thinking of the longest and strangest words of the Spanish language: Parangaricutirimicuaros. It is a word almost impossible to pronounce, it comes from a tongue twister, that Horacio and his sister used to mis-pronounce as Paranguanitos, when they were kids. We used a fragment of each word to build the name of the project; bio-phio-nitos.
 Why did you choose to keep a “vintage” and early cinema look to the project? How important is the retro design for biophionitos?
Why did you choose to keep a “vintage” and early cinema look to the project? How important is the retro design for biophionitos?
Horacio
There is a side of the design which is retro and it is related to a series of ancient little games / toys that we had in mind while we were developing the project. One of them is the Cinexin. The idea to take some inspiration from a zoetrope was nevertheless related with a conceptual objective that we had set ourselves right from the start: we wanted to reflect on the form in which a generative animation should be presented.
Many artists who work with Processing have to face the issue of finding a way to pass from the digital world to the physical one, of overcoming the limit set by the screen. Our intention was to use a totally physical and very rudimentary interface to display an animation. We wanted the interface to highlight the simple principle that makes any animation work, while revealing what usually stays hidden: the trick.
An animation is nothing but a sequence of images very similar to each other. However, as this is usually imperceptible, the spectator sees them as something difficult to understand and magical, something that is beyond their reach.
We believe that technology must be open and we also believe that making a technology open source is not enough to make it truly open. Technology must be accessible, understandable, users should be able to use it consciously. With Biophionitos, we have tried to develop an auto-generative technology that reveals itself, that throughout its development unmasks its history and functioning.
Paola
In addition to the fact that the final design is retro and inspired by toys from previous decades, we also refer to the idea of the virtual pet and to the new digital toys. The idea of creating an interactive version of Biophionitos and the fact that spectators have the possibility to create their own virtual pet evoke the Tamagochi and the way users relate to them in order to keep them alive. We assigned sentiments to each boxes so that users would feel some kind of empathy when they activate the animation and would somehow feel the magic that those first inventions had.
 What was the biggest challenge you met with when developing the project and how did you overcome it?
What was the biggest challenge you met with when developing the project and how did you overcome it?
Paola
The projects has various dimensions and lectures. It was difficult to make them tangible, to have team members agree on their meanings and to establish a series of priorities that had to be met during the 15 days of the Madrid workshop.
The presentation to Interactivos meant that we had to clarify how the work would be distributed and the time necessary to fulfill each task. The team worked perfectly well. Horacio was in charge of developing the Processing application. Igor took care of the electronic, mechanical and Arduino side of the project. I was more active on the design and creative aspects of the work. But the help of the various collaborators was essential to enable us to complete the project on time.
On the other hand, Horacio couldn’t come to Madrid during Interactivos. We had to work at a distance, discussing over skype or mobile phone.
Horacio
Working from a distance is always frustrating, there is not direct relationship between what you ask and what you get in exchange. You must invest much more time in communication. Some issues and decisions taken on the spot end up emerging in the course of a conversation, one of the side had taken that issue for granted while the other side had no idea about it. Everything happens with a delay and during the waiting time misunderstandings happen. Each time i made a modification i wanted to know how it would affect the final result inside the zoetrope. However, i couldn’t see it until someone printed the new Biophionito, recorded it in a video that he or she had then to upload on Youtube. Very often, they would just call me and try to describe what could be seen in order to accelerate the process but trying to imagine in my head what they were explaining was tremendously difficult, almost hilarious.
 I’m interested in the generative part of the work. How does it work exactly? Which kind of data do you feed the system? Why not drawing the little creatures yourself?
I’m interested in the generative part of the work. How does it work exactly? Which kind of data do you feed the system? Why not drawing the little creatures yourself?
Horacio
It’s the beta version of the program and it needs to be improved. We developed it over the course of the two weeks Interactivos workshop in Madrid. Each pet is made of a series of polygonal vertebrae; the first vertebra is the head of the animal and the rest constitutes its body. When the pet moves, the body follows the head in a decelerated way. Therefore, according to the direction and speed of the movement, the pet will stretch or shrink.
The idea is very simple, each vertebra is made of 2 segments. The first segment of each vertebra is attached to the previous vertebra and the second segment of each vertebra follows the first segment. As the answer of the second segment is not identical to the movement of the first segment, each vertebra will shrink or stretch according to the speed and direction that the previous vertebra has.
For the moment, when users create their pet, they can add vertebrae and shape it as they wish. It’s a fairly rough way of drawing but for a first version it worked fairly well.
Our objective is to end up converting each of the points that compose the segments of the vertebrae in vertex of a unique Bézier curve. Doing so the drawing will be more detailed and free, its profile will then be curved and not polygonal.
The inclination, distance and the size of the various segments that form the pet condition the way each vertebra is going to stretch and shape. Although the process is always the same, each pet behave in its own way, because when they move each vertebra has a peculiar way to react. This modifies totally the way we perceive the movements of the pet.
 Do you plan to develop the project any further?
Do you plan to develop the project any further?
Paola
We would love to see people make their own Biophionitos at home, using the D.I.Y. tutorial and that it could generate some online feedback about the results. Besides, after Sonarmatica, we were offered to give a few workshops about Biophionitos. It could be an interesting opportunity to enrich the project and hear about the perspective of the users.
Horacio
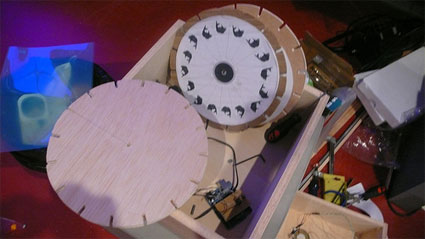
For future versions, we would like to have the program analyze the way users design. It would use several characteristics such as the number of vertebrae or their proportions and on that basis, alter the path of the pet or the way some vertebrae connect to each other. In any case, the movement of the pet is deeply influenced by the final interface. Each zoetrope can only contain16 different images, the animation must therefore be very simple and cyclic. Our objective is not to create a complex nor spectacular animation but to develop an easy to use and fun interface that will generate a pet which, by its functioning, reveals the mystery behind animation.
Thanks Paola and Horacio!
More biophionitos images.
Now for the spanish version
 Can you tell us what lies behind the name Biophionitos? What did you decide to call the project this way?
Can you tell us what lies behind the name Biophionitos? What did you decide to call the project this way?
Paola > Bueno es una historia curiosa. Horacio y yo llevamos trabajando en equipo desde hace varios años bajo el nombre de VHPlab (www.vhplab.net).Hace unos meses, el vino a pasar una temporada a NY y tuvimos la oportunidad de viajar juntos a San Francisco.
Durante el vuelo de vuelta, comenzamos a desarrollar el proyecto y a reflexionar sobre la visualización física de una imagen auto-generativa. Después muchas discusiones, logramos dotar de forma a la idea y por diferentes motivos, entendimos que la imagen debería hacer alusión a un ser vivo. Entonces, decidimos que fuera un animal, como el que aparece en nuestro logotipo.
El proyecto fue madurando conceptualmente y llegó el momento de buscar un nombre. En ese momento, teníamos claro que el prefijo “bio” debía formar parte del nombre, así que decidimos completar el resto de la palabra partir de un juego.
Nuestro objetivo era inventar un nombre que no existiera, como cuando eres un niño y denominas a algo que no conoces con una palabra inventada. Durante el proceso nos acordamos de Fiona una niña muy especial, hija de unos amigos que acabábamos de conocer durante nuestro viaje a San Francisco. Por raro que parezca también nos vino a la cabeza una de las palabras mas largas y raras que existen en castellano: Parangaricutirimicuaros. Se trata de una palabra imposible de pronunciar, proveniente de un trabalenguas, que Horacio y su hermana solían pronunciar erróneamente como Paranguanitos, cuando eran pequeños. Utilizamos un fragmento de cada palabra para construir el nombre del proyecto; bio-phio-nitos.
Why did you choose to keep a “vintage” and early cinema look to the project? How important is the retro design for biophionitos?
Horacio > Hay un aspecto del diseño que es retro y está relacionado con toda una serie de juguetes antiguos que tuvimos en mente cuando desarrollamos el proyecto, como el Cinexin (http://usuarios.lycos.es/los80/id64.htm). Sin embargo, la idea de inspirarnos en un zootropo estaba relacionada con un objetivo conceptual que nos planteamos desde el principio; queríamos reflexionar sobre la forma en que se presenta una animación auto-generativa.
Muchos artistas que trabajan con Processing se encuentran con el problema de cómo trascender del mundo digital al físico, de cómo superar la limitación que supone la pantalla. Nuestra intención era utilizar un soporte enteramente físico y muy rudimentario para mostrar una animación. Queríamos que el propio soporte pusiese en evidencia el sencillo principio que hace funcionar a cualquier animación, revelando aquello que normalmente queda oculto; el truco.
Una animación no es más que una secuencia de imágenes muy similares entre si. Sin embargo, como normalmente esto resulta imperceptible, el espectador las percibe como algo incomprensible y mágico, algo que está más allá de su alcance. Nosotros creemos que la tecnología debe ser abierta y además creemos que la tecnología no es abierta únicamente por el echo de ser open source. La tecnología debe ser accesible, comprensible, los usuarios deben poder hacer un uso consciente de la misma. En Biophionitos hemos intentado desarrollar una tecnología auto-explicativa, que se revele a sí misma, que en su desarrollo, recoja su historia y su funcionamiento.
Paola > Por otro lado, añadir que aunque el diseño final es retro y está inspirado en juguetes de hace décadas, también contemplamos como referencia de la idea de la mascota virtual y de los nuevos juguetes digitales. La idea de crear una versión interactiva de Biophionitos y el hecho que el espectador tuviera la posibilidad de crear su propia mascota virtual, nos recordó a los Tamagochi y a como el usuario se relaciona con ellos para mantenerlos vivos. Asignamos frases cargadas de sentimientos a cada una de las cajas para conseguir cierta empatía por parte del espectador en el momento de activar la animación y así transmitir de algún modo la magia que tenían estos primeros inventos.
What was the biggest challenge you met with when developing the project and how did you overcome it?
Paola > El proyecto tiene muchas dimensiones y lecturas diferentes. Resultó difícil darle forma, que todos los miembros del equipo lo entendiesen del mismo modo y establecer una serie de prioridades, para garantizar que se pudiese llevar a cabo durante los quince días del taller en Madrid.
Presentarlo a Interactivos requería tener muy claro el reparto de trabajo y los tiempos de desarrollo. El equipo funciono muy bien, porque que cada uno se hizo cargo de una parte clave del proyecto. Horacio se encargó del desarrollo de la aplicación en Processing. Igor de la parte mecánica y electrónica, de Arduino. Y yo, del diseño y la creatividad. En cualquier caso, la ayuda de los diferentes colaboradores fue determinante para poder terminar en tan poco tiempo.
Por otro lado, Horacio no pudo venir a Madrid durante Interactivos. Tuvimos que trabajar a distancia, manteniendo conversaciones a través de Skype o del movil.
Horacio > Trabajar de forma remota es siempre algo frustrante, porque no hay una relación directa entre lo que demandas y lo que recibes. Es necesario invertir mucho más tiempo en la comunicación. Siempre hay cuestiones y decisiones tomadas en el momento, que una de las dos partes del equipo presupone y la otra desconoce hasta que aparecen en una conversación. Todo sucede en diferido y durante los tiempos de espera suele haber malentendidos. Cada vez que yo hacia un cambio, estaba deseando conocer como afectaba al resultado final en el zootropo. Sin embargo, no podía verlo hasta que alguien imprimía el nuevo Biophionito, lo grababa en video y lo subía a Youtube. En muchos casos me llamaban y trataban de describir como se veía para acelerar el proceso, pero resultaba tremendamente difícil, casi cómico, tratar de hacerse a la idea.
i’m interested in the generative part of the work. How does it work exactly? Which kind of data do you feed the system? Why not drawing the little creatures yourself?
Horacio > Es una primera versión del programa, aun necesita muchas modificaciones porque se desarrolló a lo largo de las dos semanas que duró interactivos en Madrid. Cada mascota se compone de una serie de vértebras poligonales; la primera de las vértebras es la cabeza del animal y el resto componen su cuerpo. Cuando la mascota se mueve, el cuerpo sigue a la cabeza de forma decelerada. Así, en función de la dirección y velocidad del movimiento, la mascota va estirándose y encogiéndose.
La idea es muy simple cada vértebra está compuesta de dos segmentos. El primer segmento de cada vértebra está pegado a la vértebra anterior y el segundo segmento de cada vértebra sigue al primer segmento. Como la respuesta del segundo segmento no es idéntica al movimiento del primer segmento, cada vértebra se encoge o estira en función de la velocidad y dirección a la que se mueve la vértebra anterior.
De momento, cuando el usuario crea su mascota puede ir añadiendo vértebras y dándoles la forma que desee, es un sistema un poco rudimentario de dibujo pero para una primera versión ha funcionado bastante bien.
Con el tiempo, nuestra intención es convertir cada uno de los puntos que componen los segmentos de las vértebras en vértices de una única curva bezier. Así será posible hacer un dibujo mas detallado y libre obteniendo un perfil curvo y no poligonal.
La inclinación, la cercanía y el tamaño de los distintos segmentos que componen la mascota condicionan la forma en que cada vértebra se estira y encoge. Aunque el recorrido es siempre el mismo, ninguna mascota se comporta del mismo modo, porque al girar cada una de las vértebras tiene una forma particular de reaccionar. Esto modifica enteramente la forma que percibimos el movimiento de la mascota.
Do you plan to develop the project any further?
Paola > Nos gustaría que la gente empezase a hacer Biophionitos en su casa gracias al D.I.Y. y que esto generase cierta clase de feedback con los resultados a través de la web. Además, después de estar en Sonarmatica, ha surgido la oportunidad de impartir algunos workshops sobre Biophionitos. Puede ser una oportunidad interesante para enriquecer el proyecto y conocer la perspectiva de los usuarios.
Horacio > Queremos que el programa analice la forma que dibuja el usuario, en futuras versiones. Que utilice ciertas características como el número de vértebras o su proporción, para alterar el recorrido de la mascota o la forma en que unas vértebras se relacionan unas con otras. En cualquier caso el movimiento de la mascota está muy condicionado por el soporte final. Cada zootropo puede contener únicamente 16 imágenes diferentes, por lo que la animación debe ser muy sencilla y cíclica. Nuestro objetivo no es hacer una animación compleja ni espectacular, sino desarrollar una interfaz sencilla y divertida para crear una mascota que, en su funcionamiento, revele al usuario el misterio de la animación su naturaleza.