
A few weeks ago, i went to the graduation show of the Interactive Architecture Studio – Research Cluster 3 at the Bartlett School of Architecture UCL. The unit, headed by Ruairi Glynn and Ollie Palmer, focuses on kinetic and interactive design looking at the latest robotics, material and responsive systems while at the same time borrowing from a long history of performative machines and performing arts. As you can guess, i was quite enthusiastic about many of the works developed over this one-year postgraduate course.
One of the most interesting for me was William Bondin’s research project which explores the gap between digital simulation and physical prototyping in the performance of dynamic architectural systems.
Bondin’s proposal involves a colony of self autonomous creature-like structures, called Morphs, which very slowly navigate public parks. Their moves are not just dictated by a set of pre-programmed rules, they also rely on their physical and social environment.
Morphs exist and wander freely as individual nuclei but they can also join together and adopt certain geometries according to their needs and circumstances.
This is still very much a work in progress but a very promising one.
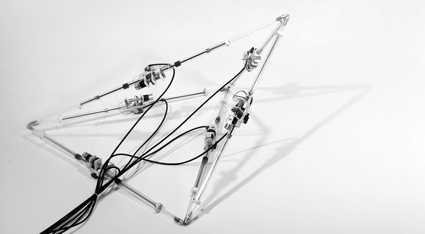
Simulations for tetrahedron and octahedron nuclei were carried out. In addition, one tetrahedron nucleus was fabricated as a proof of concept in order to understand the limitations of the technology employed.
Video documenting the whole research:
The morph performing one step:
I contacted the young architect for a quick interview:
Hi William! If i understood correctly, your self autonomous creature-like structures are inspired by a species of brainless slime mould. Can you tell us what you found interesting about that type of slime and how this translated into the Morphs?
The interesting thing about slime mould, in particular Physarum polycephalum, is that its cognitive processes occurs within its environment rather than a centralised brain. It is an example of an organism which has developed a clever way of exploiting its surroundings in order to perform navigational tasks and memory-related processes. For instance, when foraging for food it deposits slime in areas which have already been explored, and then avoids the same slime so that it will not re-explore the same area twice. This simple feedback technique inspired me to develop a form of mobile architecture which, analogously to slime mould, deposits digital data into its environment in order to off load its computational processes such as path finding and spatial memory. In fact, Morphs are very low-level creatures in terms of computational abilities and their complex trajectories are a result of the complex environments in which they are placed.
 Proposal for Mobile Reconfigurable Polyhedra (MORPHs) to occupy a site and encourage interaction through play
Proposal for Mobile Reconfigurable Polyhedra (MORPHs) to occupy a site and encourage interaction through play
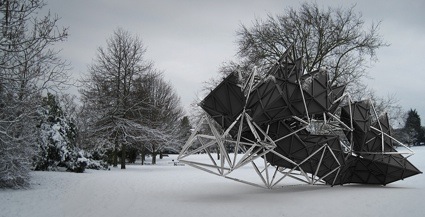 MORPHs during winter might experience neglect
MORPHs during winter might experience neglect
Could you describe the behaviour of the Morphs?
Morphs, which stands for MObile Reconfigurable PolyHedra, have a behaviour which is dictated by the sites in which they are located and their physical morphology. They are attracted to areas with high pedestrian traffic which ensures a higher probability of engagement with the public, and they stay clear of vehicular roads due to their very slow movements. Therefore, characteristics which are embodied within a site become highly influential to their “desired” locations. Similarly, their physical composition dictates the way they perceive their environment and consequently the way they behave. For example, due to their solar powered circuitry, they avoid shaded areas and do not travel during night time or overcast weather. They are also terrified of water and do not operate in wet conditions, in order to protect their electronics. These are their basic low-level behaviours which, similarly to our primary instincts, ensure their own protection and survival in complex environments. Therefore as an end result, you have these creatures which are very playful and gather in areas where people are likely to meet, but they get scared easily and become very introvert when threatened.
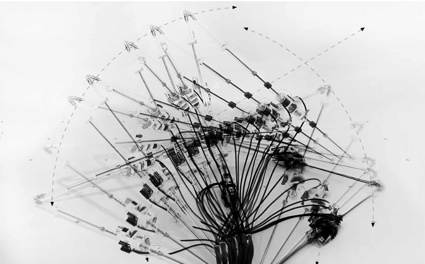
 Fabricated fully-actuated tetrahedral truss performing a walking action
Fabricated fully-actuated tetrahedral truss performing a walking action
Because Morphs move so fluidly and elegantly, i couldn’t help but think of Strandbeests. But they have nothing to do with Theo Jansen’s creatures, right?
I really enjoy Jansen’s work and appreciate it in its context; as beautiful objects which occupy and travel across landscapes. However, as an architect, I’m not only interested in the spaces which man-made creatures inhabit but also in the spaces which they create. Morphs have the ability of joining together into complex formations to create spaces which can be occupied by people, and respond to these temporal inhabitants. Additionally, Theo Jansen’s creatures are automatons which are unaware of their surroundings and the people within their “personal space”. Morphs, on the other hand, are responsive spatial structures which communicate between them and their users in order to perform collective tasks. If you threaten one Morph you might send a whole community into hiding, while if one of them enjoys learning a new dance routine it might teach it to others and perform it in groups.
The Morphs move super super slowly. Can’t you make them move faster? Why?
All buildings move. They do so over a very prolonged timescale, and it can take centuries for a building to move a couple of millimetres. So if we had to speculate on how buildings view time, because after-all Morphs are architectural creatures, we have to acknowledge the fact that architecture operates on a very different timescale than its users. Morphs operate on a mediated timescale, because although we perceive them as very slow movers they are lightning fast compared to their ‘static’ counterparts. In terms of time, they exist somewhere in between. This also gives us practical benefits, such as very low power consumption and risk mitigation.
The “Morphs rely on environmental cues and human participation in order to attain purposeful behaviour.” Which kind of environmental cues and human participation are you talking about?
Morphs continuously assess light intensity and water presence in order to take informed decisions about their next steps. This ensures that they will not get trapped in ponds or under trees, and helps them to locate themselves in sunny and dry areas. However, Morphs are not completely self autonomous.
There are four classes, or sub-species, of Morphs and each of them has different purposes and degrees of control. The music-enabled units, which are finished in bright orange, are very slow and rarely change their location. They allow musicians to play music within their enclosure, and transmit the sounds they pick up via wi-fi, as a sort of a free-for-all radio station. The purple ones, which relate to dance, are very fast movers and they respond to push-pull action by their choreographers. They are able to store unique geometries in sequence and play them back when instructed to. The architectural ones, identified by their blue colour, are very slow movers but they can carry a significant amount of load. They are ideal for assembling large configurations and can be attached to different coloured units to create complex spaces. An additional class of these polyhedrons is also envisioned to cater for open-source development, whereby users can design and build bespoke components which can be plugged into existing units.
Do the machines learn in the course of their ‘life’?
It is envisioned that over time these machines start to learn about their environment, participants and even themselves. This will give them the ability to take better informed decisions about their future actions. For example, if a tetrahedron breaks one of its edges it will then have to learn a new way how to roll over without using that side. In addition, it might ask for collective help from its peers to help it travel or become permanently bonded to another Morph for successful locomotion. Another suggested form of learning is the ability to predict participants’ preference and behaviour. This will ensure that the right amount of units are present at the right location when needed.
However, in practice machine learning is a very complex area of research. So far we have been exploring this field in simulation, with limited degrees of success. The intention is to collaborate with robotics engineers and computer scientists in order to actualise these processes into the next generation prototypes.
Do you see applications for the Morphs? In architecture, robotics or other areas?
Morphs started out as a research project into adaptive behavioural architecture. Over the course of a year, it has developed into a semi-speculative project which brings together robotics, computer science, public art, landscape architecture and urban design.
What is next for the Morphs?
Morphs are planned to be unleashed by the end of 2015 as an autonomous but sociable reconfigurable architecture. Prototyping of a tetrahedron nucleus started in March 2013 and has resulted in one functional unit. Current research involves the programming of these nuclei, development of their digital communication and the simulation of their social behaviour. The next fully mobile, untethered, Morph is aimed to be completed by the end of 2013 before larger assembles are explored through 2014.
Thanks William!