
As-Rigid-As-Possible Shape Manipulation is a system that lets a user move and deform a 2D shape without manually establishing a skeleton or freeform deformation domain beforehand.
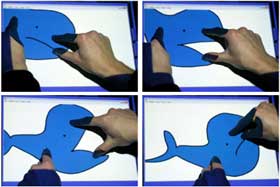
The shape is represented by a triangle mesh and the user moves several vertices of the mesh as constrained handles. The system then computes the positions of the remaining free vertices by minimizing the distortion of each triangle. The user chooses several points inside the shape as handles and moves each handle to a desired position. The system then moves, rotates, and deforms the overall shape to match the given handle positions while minimizing distortion.
Video.
By Takeo Igarashi, Tomer Moscovich and John F. Hughes.
Via Hack a day.